Building the first commercial scalable multi-mission long range AESA radar.
Building the first commercial scalable multi-mission long range AESA radar.
General Radar democratizes
the Aerospace radar architecture
Founded in 2016 in Belmont, California, General Radar Corp. develops high-resolution phased-array radar systems, with a focus on serving customers in the aerospace and defense, wind energy, autonomy, and weather sectors.
Our mission is to deliver advanced aerospace radar solutions at greatly reduced costs while making possible a broad range of new and expanded uses.
Standalone AESA Radar
We are commercializing a complete C-band high-resolution multi-mission radar with a GaN AESA front-end, digital beam-forming, and a supercomputing backend.
Our radar is scalable in size & power. Multiple radars are networkable to achieve distributed cohered architectures and enable a range of novel applications.
The GenRad GFC AESA Radar
We are commercializing a complete C-band high-resolution multi-mission radar with a GaN AESA front-end, digital beam-forming, and a supercomputing backend.
Our radar is scalable in size & power. Multiple radars are networkable to achieve distributed cohered architectures and enable a range of novel applications.
.png)
Radar Upgrades
General Radar has developed an advanced radar signal processing backend capable of enhancing the capabilities of existing radar systems. Allowing Customers to revitalize exquisite radars of record through the use of digital beam-forming, high-resolution waveforms, multi-GSPS signal sampling, supercomputer-scale signal processing and state-of-art algorithms.



Mark-IV: A high-res mmW imaging radar
General Radar has developed a high resolution 3D imaging radar operating in the 76~81GHz band for autonomous vehicles, counter-drone, airfield FOD and wind-profiling applications called the Mark-IV. Its antenna features two analog mmW AESA beamformers producing a 1x1° narrow electronically-steered pencil-beam with up to 6 cm range resolution.
Its signal processor backend is composed of 32 independent baseband channels, each featuring record-performance digital pulse compression correlators for long-range high-resolution and interference-resistant operation, LIDAR-like point cloud data output, and target imaging and identification via arbitrary waveforms.
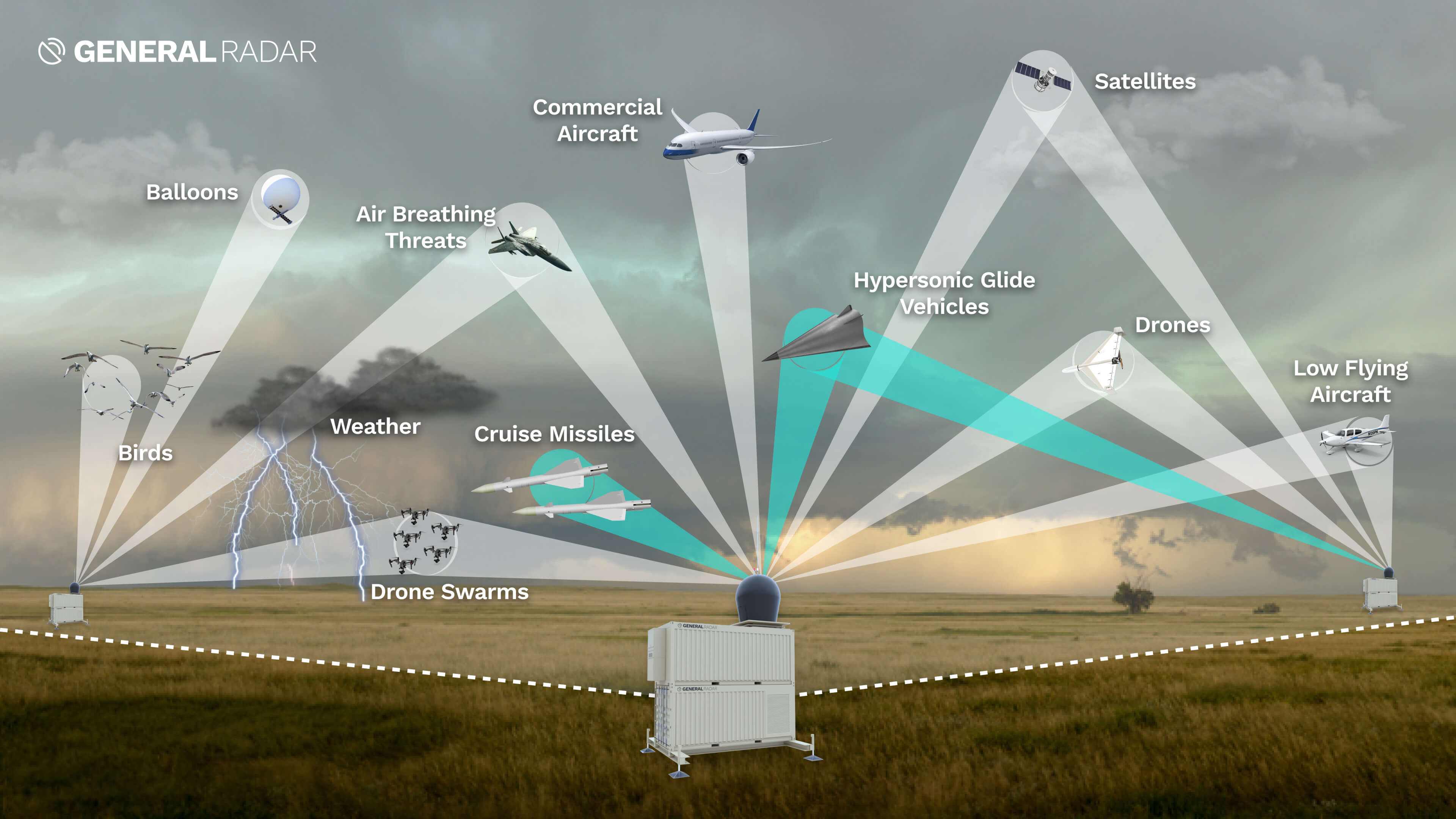
True Multi-Mission performance
- Long range & High power
- Fixed non-rotating AESA antennas enable tracking modern high-speed low altitude threats
- GPU supercomputing w/ AI capabilities
- Multi-Mission enables simultaneous tracking of most threats
- 1000x higher resolution than current radars
- Extremely cost effective. 100% COTS. Unclassified. Simplified siting